Since finishing the alt mode (though there are a few pieces I think I might go back and add on sometime), I've been working on cutting it apart and adding in the robot bits. I started with the feet first since it quickly became apparent that my original idea for them wouldn't work. And then the second idea wouldn't work. And now the idea I'm going with kinda works, but still has it's problems.
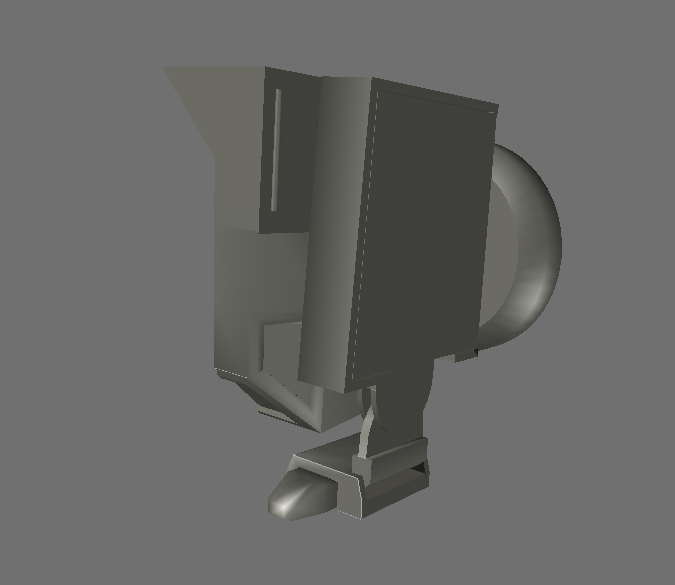
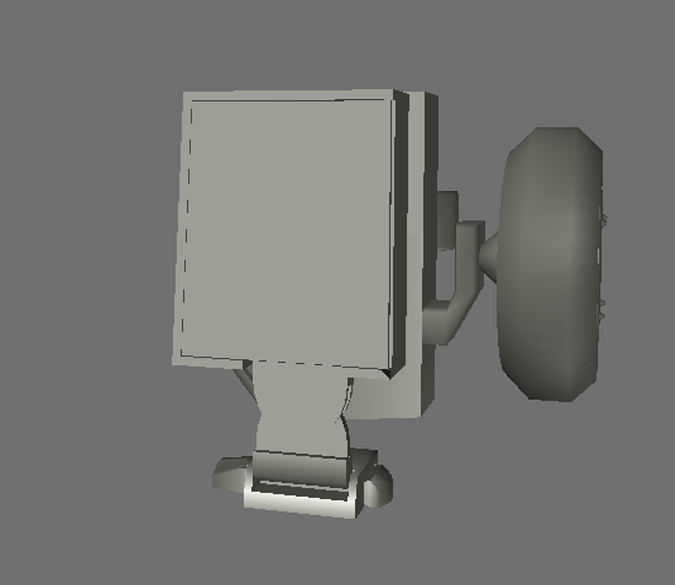
As you might be able to see from this horrendous screen-grab, the section behind the front wheel folds down along the cockpit, the wheel folds back, the bump rotates and folds up and the foot assembly rotates out of the first section.... man, I'm having trouble keeping up with it and I made it myself.

The biggest problem that shows up is how absurdly small the foot will be. For it to fit within the section behind the front wheel it needs to be very small and flat. I've made toes and a heel that fold out but it's still so small I'm afraid it wouldn't be able to hold him up if it were a figure. I don't like the joint system I'm using either, with the giant cog-thingees creating the ankle joint, and the huge pivot on the foot itself.
I'm thinking I'll revamp most of it, replacing the ankle system here with a normal ball-and-socket and extending the back of the foot out to allow for a bigger toe and heel. Right now both of them rotate out, but I'll probably change them to sliding out so I can make them wider as well.
In all though, the feet are going to be damn small. And unfortunately, I'm still learning with Lightwave and every change I make takes way too long. I'm getting more comfortable with it though and hopefully more revamps will come about quicker.
No comments:
Post a Comment